Wat is Lidar (LiDAR)? Lidar combineert radarbereikmogelijkheden met camerahoekresolutie om nauwkeurige dieptewaarneming te bieden om het beeld compleet te maken (Afbeelding 1).

Afbeelding 1: Camera's, radar en lidar zijn de drie voorkeurstechnologieën voor autonoom rijden. (Afbeelding tegoed: ADI)
Het visuele gedeelte vertegenwoordigt de zichtbaarheid van de camera of bestuurder, objectclassificatie en laterale resolutie. Duisternis en weersomstandigheden zoals sneeuw, stof of regen kunnen deze vaardigheden aantasten. Het radargedeelte vertegenwoordigt de terugkeer van het RF-signaal. Dit signaal is ongevoelig voor weersomstandigheden en duisternis, terwijl het ook de afstand meet. Het lidar-gedeelte kan het waarnemingsbeeld completeren door verdere objectclassificatie, laterale resolutie, bereik en donkere penetratie te bieden.
Hoe werkt lidar?
De basiselementen van een lidar-systeem zijn onder meer een blokgolfzendersysteem, de doelomgeving en een optisch ontvangersysteem dat wordt gebruikt om de afstanden tot externe elementen in de omgeving te interpreteren. De lidar-detectiemethode gebruikt licht in de vorm van een gepulseerde laser om het bereik te meten door de time-of-flight (ToF) van het geretourneerde signaal te analyseren (Afbeelding 2).
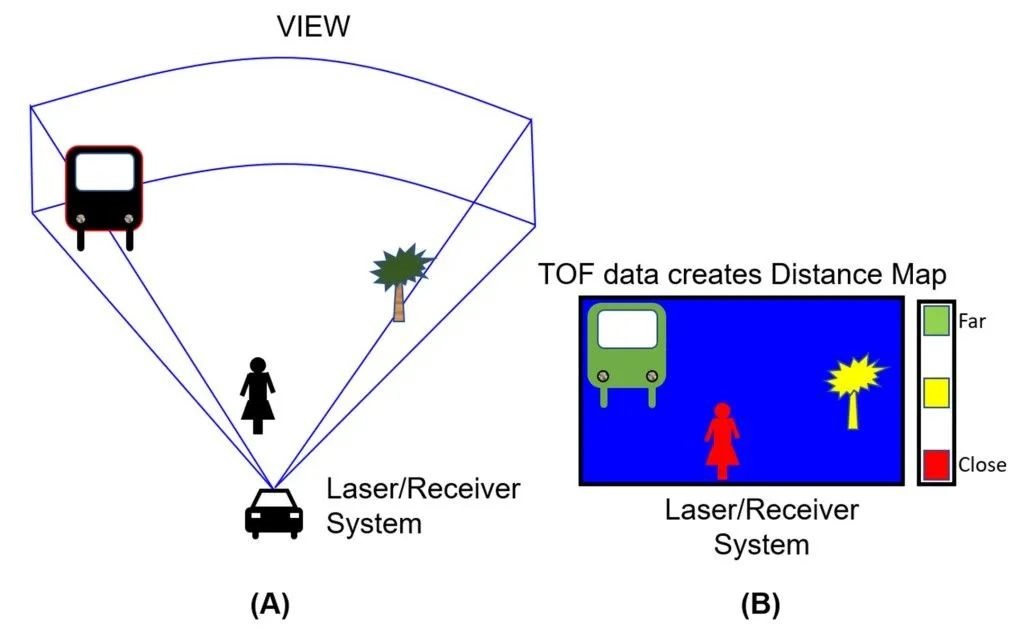
Afbeelding 2: Elke lidar-zendeenheid heeft een driehoekig "gezichtsveld". (Afbeelding tegoed: Bonnie Baker)
De tekening van de afstand is afhankelijk van het optische digitale signaal.
Signalen in het digitale domein
De circuitoplossing van lidar is om het probleem van signaalontvangst op te lossen via een transimpedantieversterker voor auto's. De ingangstrap wordt gebruikt om negatieve ingangsstroompulsen van de fotodetector te accepteren (figuur 3).

Figuur 3: Het elektronische deel van een lidar bestaat uit een laserdiodezender en twee fotodiode-ontvangers. (Afbeelding tegoed: Bonnie Baker)
Laserdiodes zenden digitale pulsen door een stuk glas. Dit signaal wordt ook gereflecteerd op de D2 fotodiode. De verwerking van dit signaal zorgt voor de transittijd en elektronische vertraging die in het systeem is ingebouwd.
De digitale lichtsignaalpulsen raken het object en worden teruggekaatst naar het optische systeem. De terugkerende puls wordt gespiegeld naar de tweede fotodiode Dl. Het elektronische gedeelte van het D1-signaalpad is hetzelfde als het D2-signaalpad. De vliegtijd kan worden berekend nadat de twee signalen de microcontroller (MCU) hebben bereikt.
Momentopname van de markt
Automotive lidar-systemen gebruiken gepulseerd laserlicht om de afstand tussen twee voertuigen te meten. Automobielsystemen gebruiken lidar om de voertuigsnelheid en remsystemen te regelen als reactie op plotselinge veranderingen in de verkeersomstandigheden. Lidar speelt een belangrijke rol in semi- of volautomatische autohulpfuncties zoals waarschuwings- en vermijdingssystemen voor aanrijdingen, lane-keep assist, lane-departure warning, dodehoekmonitors en adaptieve cruisecontrol. Automotive lidar vervangt radarsystemen in eerdere voertuigautomatiseringssystemen. Lidar-systemen kunnen variëren van enkele meters tot meer dan 1.000 meter.
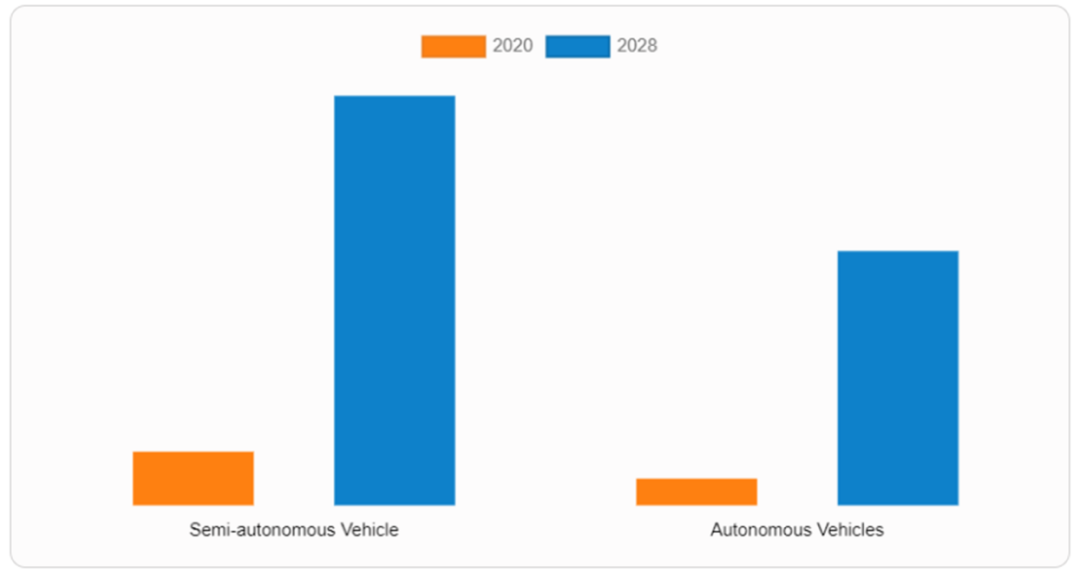
Afbeelding 4: De lidar-markt voor auto's is gesegmenteerd in semi-autonome en volledig autonome voertuigtoepassingen. (Bron afbeelding: Allied Market Research)
Zelfrijdende auto's worden al op grote schaal gebruikt en lidar-beeldvormingssystemen zullen de situatie verder verbeteren. Radar, camera's en lidar-apparatuur zijn nog steeds de technologieën bij uitstek voor semi-autonoom en volledig autonoom rijden, en de prijs van lidar daalt en de markt versnelt deze verandering.
Copyright @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - China Glasvezelmodules, fabrikanten van glasvezelgekoppelde lasers, leveranciers van lasercomponenten. Alle rechten voorbehouden.